
항공기 항법시스템(Navigation), GNSS, GPS, GLONAS, GALILEO, SBAS, GBAS, ABAS
- 항행항법
- 2021. 8. 8. 16:50
항법시스템 (Navigation)
1. 현행 항법시스템과 차세대 항법시스템의 차이점
| 현행시스템 | 차세대시스템 | |
| 전환시스템 | 이용목적 | |
| VOR, DME | 위성항법시스템 모니터링 (GNSS Monitoring) |
GPS, GLONAS, GALILEO 또는 광역보강시스템 신호를 모니터하여 이들의 정상 운용상태를 기본적으로 확인 |
| ILS, VOR, DME | 지역보강시스템 (GBAS) | 항공기가 CAT-I 급 GBAS를 이용해 현재의 비행 상태를 확인하면서 활주로의 다중 경로로 정밀접근 및 이착륙 |
| 항공기가 CAT-n/m급 GBAS를 이용해 활주로에 다중 경로로 정밀접근 및 이착륙 |
||
| VOR, DME | 위성복합항법 (GPSD, VOR, DME VOR, DME GLONAS, GALILEO 등) |
항공기가 GLONAS, GALILEO 등 복합위성항법 융합기술 서비스를 이용해 항공로 및 공항 상공에서 비행 |
| VOR, DME | 기내보강시스템 (ABAS) | 항공기가 기내 자체적인 정밀 항법장치를 이용해 현재 비행위치를 확인하면서 항로비행 또는 공항 접근 비행 |
| VOR, DME | 광역보강시스템 (SBAS) | 항공기가 SBAS의 위성항법을 이용해 항공로 및 공항 상공에서 정밀비행 |
현행 항법과 차세대 항법의 차이점
2. 차세대 항법시스템의 운영 개념
가. 위성항법시스템 (GNSS : Global Navigation Satellite System)
* GNSS는 언제든지 전 세계 어디서나 정확한 3D 위치와 시각을 제공하는 위치정보 시스템을 뜻하며 현재 미국의 GPS, 러시아의 GLONASS, EU의 GALILEO 등이 있음.
* 1980년대 초, 민간항공부분에서는 날로 증가하는 항공교통량의 증대로 인해 기존의 통신, 항법, 감시 및 관제시스템으로는 가까운 미래의 항공교통량을 감당하지 못할 것이라는 우려가 제기되었음.
* ICAO는 이러한 문제점을 해결하기 위하여 1983년 FANS(Future Air Navigation System) 특별위원 희를 설치하여 21세기 항공교통량의 폭발적인 증가에 대비하기 위한 새로운 개념의 CNS/ATM 시스템을 연구하기 시작하였음.
* FANS 특별위원회의 연구결과에 의하여 1991년에 9월 캐나다 몬트리올에서 개최된 제 10차 ICAO 항행회의에서는 기존의 항공운항시설을 디지털 데이터 통신기술과 위성항행시스템을 기반으로 하는 새로운 개념의 차세대 CNS/ATM으로 전환하는 계획(2010년 이후 실행)을 수립하게 되었음.
* 이에 따르면 지상시설에 고착되어 있는 항법시스템은 GPS 등 위성항행시스템으로 전환되고, 레이더 및 조종사의 음성보고에 의존하는 현재의 항공감시 기능은 위성항행시스템과 데이터 통신을 기 반으로 하는 시스템으로 전환되어 레이더는 백업시스템의 기능을 담당할 것으로 예상됨.
* 통신, 항법, 감시 기능의 일대 전환은 항공교통관제 부분에서도 많은 변환을 가져올 것으로 예상됨.
나. 위성항법 지역보강시스템 (GBAS : Ground Based Augmentation System)
* GBAS는 ICAO가 2(X)1 년 11 월 차세대 이착륙시스템으로 정하고 각국에서 이를 개발하여 활용하도록 권고한 장비임.
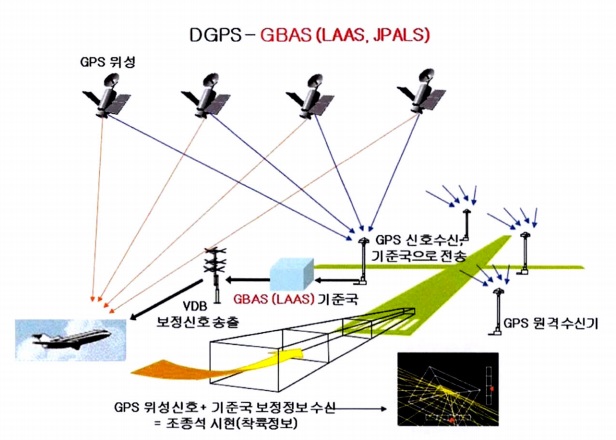
* GPS의 위치오차와 GPS 각 위성의 이상 유무 등을 VHF 데이터링크로 항공기에 지속적으로 송신하고 항공기는 GBAS가 보내는 정보를 이용하여 GPS 오차를 상쇄시키고 문제가 있는 위성은 위치 계산시에 제외하면서 보다 정확하고 안전한 위치정보를 이용하여 정밀 이착륙을 하게 됨.
* 2004년 11월에 개정된 ICAO PANS-OPS Vol. II 에는 CAT-I GBAS 정밀접근절차 설계기준이 도입되었으며 새롭게 도입된 GBAS절차 설계기준의 경우 전체적인 절차 구성, 세부기준, 정밀도 부분 에서의 장애물의 영향을 방지하기 위한 OAS(Obstacle Assesment Surface), CRM(Collision Risk Modeling) 등의 기본 골격은 기존의 ILS CAT-I 정밀접근 절차의 구성과 거의 동일하며 Fix Tolerance Area의 구성 등의 세부적인 GNSS관련 특성은 기존의 RNAV GNSS절차의 그것을 수용하고 있음.
* GBAS는 ILS와 같은 l(X)KHz대를 사용하고 있지만, ILS가 하나의 활주로에 하나의 접근만을 유도 할 수 있는 반면 GBAS는 한 활주로에 대해 이론상으로 192개의 접근을 유도할 수 있으므로 ILS 운용에 비하여 상당한 유연성을 제공할 수 있음.
* 현재 GBAS는 CAT-I(Category I) 정밀접근의 정확도만을 지원할 수 있으나,GPS 현대화 또는 GNSS 위성시스템의 추가 등으로 인한 GNSS 위성시스템의 시스템 정확도가 향상되어 현재의 ILS 와 같이 CAT-II 및 CAT-III 정밀접근 서비스가 가능한 미국에서 LAAS(Local Area Augmentation System)가 제공됨.
다. 복합위성항법 (GPS, GLONAS, GALILEO 등)
* GPS
- GPS는 미 해군이 1950년대 후반부터 위성 기반항법시스템인 Transit, Timation 등을 운용한 경험 을 바탕으로 1970년대 초에 미국 국방성이 설립한 GPSJPO에 의해 개념연구가 시작되어 1978년 2 월에 최초의 Block I 위성이 발사되었고,이후로 2, 3단계에 걸친 시스템 설계와 검증이 이루어졌음.
- 1993년 정상가동이 선포된 GPS는 GNSS의 대명사가 되었으며 초기에는 군용으로 개발 되었으나 민간에게 그 사용이 허락되어 1990년대 중반 이후부터 비약적인 사용 증가가 발생하였음. 더욱이 2000년 5월 미국에서 GPS SA(Selective Availability)를 제거하게 되어 위치 정확도는 수십 미터 정도로 향상되었음.
- GPS 위성은 위성신호 코드를 전송하고 GPS 수신기는 이 신호를 받아 수신기의 위치,속도를 계산하게 됨. 수신기에서 측정한 거리는 오차 성분을 포함하고 있으므로 의사거리(Pseudo range)라고 부르며 위성과 수신기간의 거리는 전파의 전달 시간을 측정하여 구해지는데 이를 위하여 위성과 수신기간의 시각이 정확히 동기 되어야 함. 그러나 수신기에 사용되는 시계는 위성의 원자시계에 비하여 상대적으로 부정확한 저가의 발진기를 사용하므로 측정된 거리에는 수신기 시계오차가 포함되므로 이를 보정하기 위하여 4개 이상의 위성에 대한 의사거리를 이용하여 위치와 시각을 구함.
- GPS를 구성하는 요소는 위성국(Space Segment), 위성을 제어하고 관리하는 지상국 (Control Segment) 그리고 위성신호를 수신하여 위치를 구하는 수신기(User Segment)로 구성됨.
- GPS 위성국은 기본적으로 24개로 구성되어 있으며 지구상 어디서나 4개 이상의 위성을 관측할 수 있도록 설계되어 있음. 24개 위성은 궤도면의 기울기(inclination)가 55도인 6개의 궤도에 각각 4개씩 배치되어 있음.
* GLONNASS (Global Navigation Satellite System)
- 러시아의 위성항법시스템인 GLONASS는 GPS와 마찬가지로 전 세계를 운용범위로 하는 측위시스템으로. 4개 위성의 신호로 위치를 계산한다는 원리는 GPS와 같으나, 궤도면 수, 위성신호 구별 방법, 반송파 주파수, 표준시간계, 좌표계, 궤도표현방식이 다름.
- 1982년 4개의 위성 발사를 처음으로 1996년 잠깐 24개 위성군의 모습을 갖추었음.
- 러시아는 GLONASS의 정상화와 H/W의 개선을 위해 GLONASS-M이라 불리는 개선된 위성 항행시스템을 계획하고 첫 위성발사를 2003년 12월에 이루었으며,GLONASS-M 프로그램은 2002년 시작하여 2011년에 마무리되었음.
* GALILEO
- 1990년대 후반 유럽연합(EU,European Union)은 우주 개발, 교통,통신 등 전략분야에서 독자적인 발전을 이루기 위해 미국의 인공위성 기반 위치측정시스템(GPS, Global Positioning System)에서 독립된 위성항법시스템을 구축하기로 결정하고 유럽연합 회원국들의 기술과 자본이 투입된 새로운 위성항법시스템인 갈릴레오 프로젝트(Galileo Project)를 추진함.
- 갈릴레오 위성항법 시스템의 주사업자는 유럽연합,ESA, 민간회사들이 각 세부과제별로 컨소시엄으로 구성되어 있음.
- 갈릴레오 시스템의 구성은 Global Component, Local Components 그리고 사용자 수신기와 터미널로 크게 구분되며, EGNOS(European Geo-stationary Navigation Overlay Service)와 External Galileo-related systems components를 추가하기도 함.
- Global Component는 3개의 MEO(Medium Earth Orbit) 위에 30기 (27 +3 Active Spares)의 항법 위성으로 구성되는 위성국 항법 위성들을 모니터링하고 서비스를 제공하는 Ground Control and Mission Segment를 포함함.
- Local Components는 정확도, 가용성,연속성, 무결성 등에 대하여 부가적인 성능이나 기능을 더하여 지역적인 서비스를 제공하기 위하여 필요한 구성요소임.
- 갈릴레오 프로젝트는 유럽연합 회원국뿐만 아니라 중국, 이스라엘, 모로코 등 기타지역 국가들의 참여도 활발하며 우리나라도 2006년 9월 한-유럽연합 간 갈릴레오 협력 협정 체결로 갈릴레오 프로젝트에 합류하게 됨.
라. 광역보강시스템 (SBAS: Satellite Based Augmentation System)
* SBAS
- GNSS의 보정시스템의 하나로 지상 또는 공중파 네트워크를 통하여 연결된 다수의 기준국들이 넓 은 범위에 걸쳐 위치하고, 각 기준국 지점에서 관측되는 모든 위성들의 정보를 종합하여 중앙처리 기관으로 보내면 그 정보들을 종합하여 광역보정 값을 계산하는 원리임.
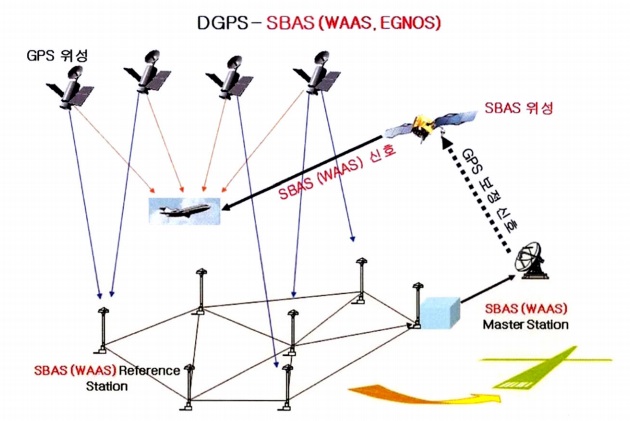
- 현재 개발되고 있는 SBAS로는 FAA에서 개발한 WAAS(World Wide Augmentation System), 유럽연합이 EUROCONTROL과 제휴한 유럽우주국의 EGNOS, 일본 민간항공 국에서 개발한 MSAS(MTSAT SatelliteAugmentation System) 등이 있음.
- SBAS는 상대적으로 적은 수의 지상 기반시설을 이용한다는 점과 CAT-I 수준의 정밀 접근 서비스를 광역에 걸쳐 제공할 수 있다는 점에서 매력적이지만 시스템의 복잡성과 구축비용 측면에서 모든 국가나 지역에서 이러한 보정시스템을 채택하기에는 많은 어려 움이 있을 것으로 예상됨.
항공기 항법시스템(Navigation), GNSS, GPS, GLONAS, GALILEO, SBAS, GBAS, ABAS
'항행항법' 카테고리의 다른 글
| PBN(성능기반항행)이란? (RNAV/RNP) (0) | 2021.08.11 |
|---|---|
| 감시부문(Surveillance), 감시시스템, 관제시스템, MLAT, A-SMGCS (0) | 2021.08.10 |
| LNAV(LATERAL NAVIGATION)/VNAV(VERTICAL NAVIGATION) 이란? (0) | 2021.08.08 |
| 관제사에게 묻는다(조종사들의 궁금증에 대한 ATC의 대답) - 5탄 (1) | 2021.08.07 |
| 관제사에게 묻는다(조종사들의 궁금증에 대한 ATC의 대답) - 4탄 (0) | 2021.08.07 |



